 |
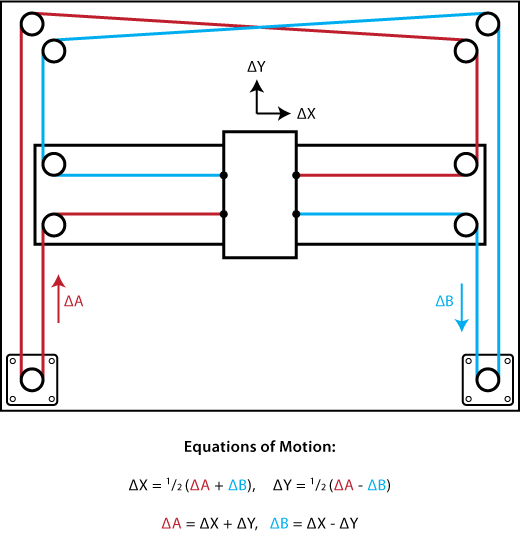
| Prinsip pergerakan yang dicadangkan dengan CoreXY seperti di Corexy.com |
Berdasarkan gambar ini. Kaedah CoreXY (nama kaedah sebenar kurang pasti) ini kelihatan menggunakan kedua-dua stepper motor untuk menggerakkan paksi X dan Y secara serentak. Berbeza dengan kaedah lain di mana setiap motor mengawal hanya satu pergerakan, contoh 1 stepper untuk mengawal pergerakan paksi X, dan satu lagi paksi Y. Apa kelebihannya?
- Carriage yang lebih ringan memadangkan stepper motor tidak lagi bergerak. Stepper motor boleh diikat pada rangka printer sahaja.
- Berbanding dengan design Prusa Mendel, MendelMax yang mana Y-carriage perlu bergerak, menyebabkan saiz printer juga turut bertambah. Dengan CoreXY, saiz printer boleh dikecilkan disebabkan oleh penggunaan ruang yang lebih efisien.
Beberapa printer yang menggunakan teknik coreXY yang sedia ada termasuklah :
CoreCuber SAKURA http://www.thingiverse.com/thing:150767
Cyrus 3d Printer http://www.thingiverse.com/thing:76877
UConduit H-Bot 3D printer http://www.thingiverse.com/thing:102972
Memang printer dah ada. Boleh download .stl dan bina sekiranya rasa berminat untuk mencuba. Tetapi tangan terasa gatal untuk cuba design semula printer yang diluar sana. Satu sahaja matlamat saya. Komponen semuanya hendaklah berada di dalam rangka. Hasilnya.
 |
| Warna kuning adalah cubaan simulasi pergerakan belt/fishing line. Setakat ni nampaknya selari. |
 |
| Gambar sudut lain bagi matlamat yang sama. Ok aja. |
 |
| Hasil render awal rangka printer, Zam CoreXY Alt. |
 |
| Hasil render awal printer yang bertutup, Zam CoreXY alt. |
Teringin sangat nak bina satu printer ini untuk letak di office. Agak2 bos marah tak? Sekiranya ada pendapat jangan malu dan segan untuk komen ye.